Computer Vision - Object Detection
I trained this computer vision model for the rover, because we need to detect two types of hammer and a water bottle of unknown color during the competition.

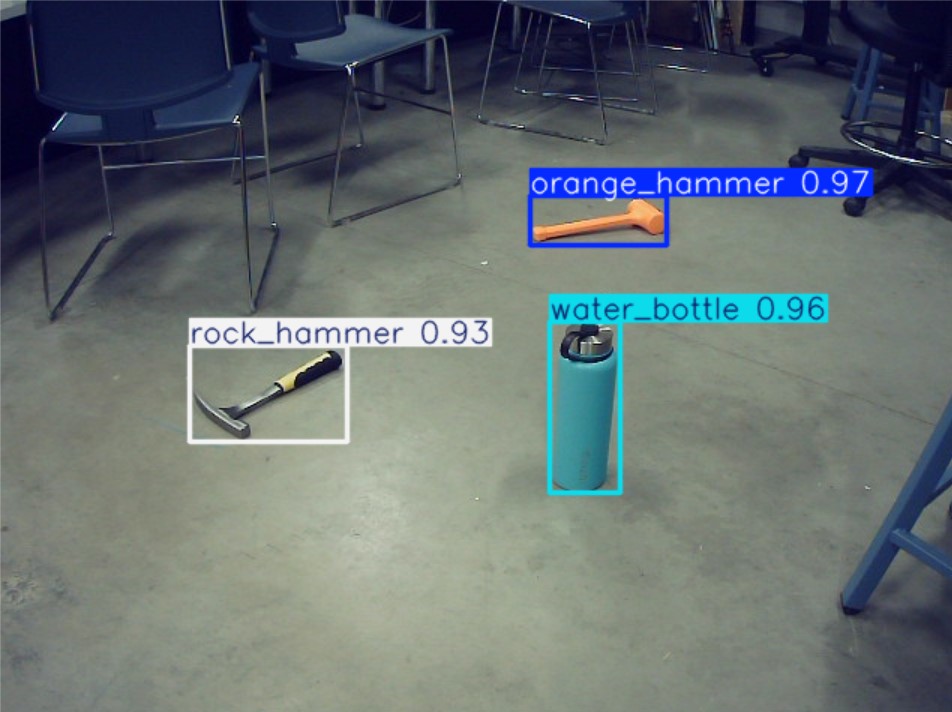
Figure 1: Detection of Hammers and Water Bottle.
Implementation
I collected around 500 images of the hammers and various water bottles from different angles and on different backgrounds. I then annotated the data with horizontal bounding boxes using the X-AnyLabeling tool. I used this data to train a yolo26n model for 200 epochs, which resulted in good performance and very fast inference speed, which is required for the intended platform, which is an NVidia Jetson Orin Nano.