
Rover Suspension
This suspension is a four wheel rocker design, with additional independent shock absorption on each wheel.
View Project → This suspension is a four wheel rocker design, with additional independent shock absorption on each wheel.
View Project →
This is a standalone portable base station for controlling the rover. It has a small display and is powered by a raspberry pi 5. It can be powered by either an internal battery or a wall adapter.
View Project →This is a multibody dynamics simulation of one half of the Rover's suspension system, created using Matlab.
View Project →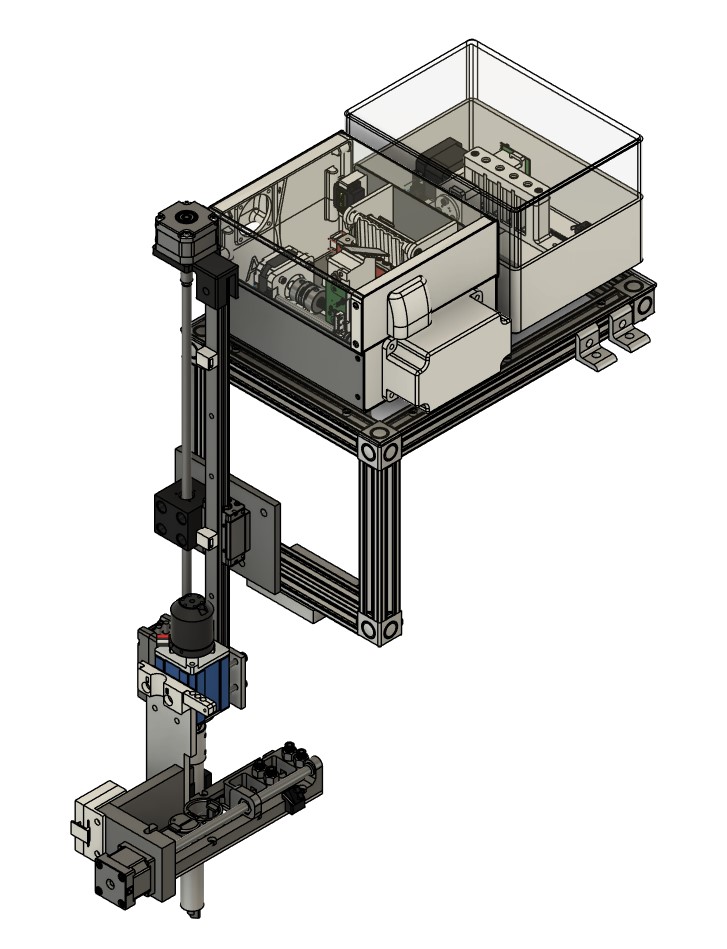
I worked on the auger and soil sampling system on the rover's life detection module. It drills into the soil to collect samples and then feeds them to the detectors.
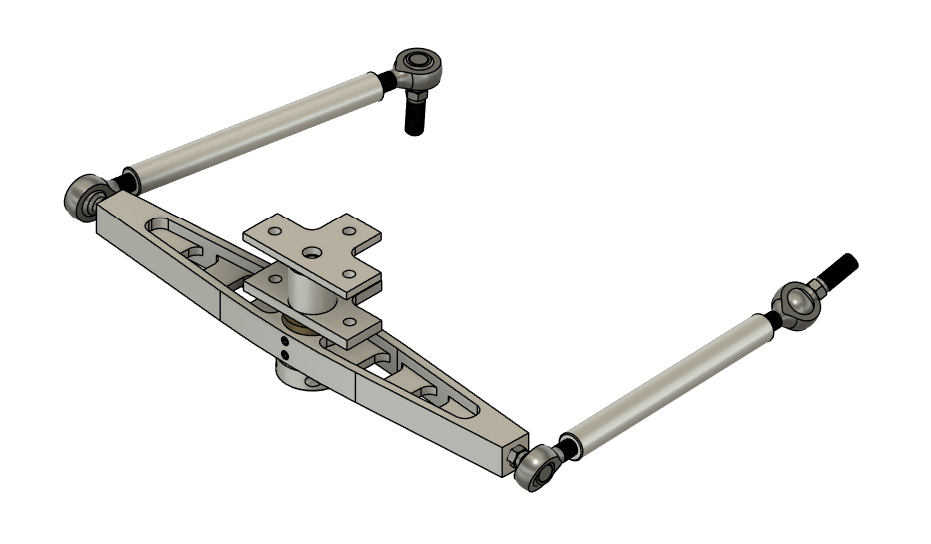
This assembly connects to each half of the Rover's suspension to allow it to articulate.

I designed wheels for the previous rover suspension, which feature 3D printed hubs with cast urethane tires.